Risk assessment for Drone operations: Using SORA methodology (with a simple example) – Part I
We all hear, somehow and somewhere, about SORA. It’s a risk assessment methodology proposed by JARUS, the group of experts that make rules for the RPAS / UAV market and had published several documents related to this sector. But, how could I apply SORA for my pretended drone activity? Let’s have a look to a simple example…
Imagine we are going to fly a drone with the following characteristics:
- MTOM: 20Kg (maximum take-off mass)
- Drone Dimension: 1.5m (end-to-end wings measure in case of fixed wing drones or rotor diameter in case of rotary systems)
- Activity brief description (what I want to do and how): No-urban zones inspection, faraway from airports and flying not higher of 400ft with a maximum velocity of 50m/s and VLOS. Semi-autonomous capabilities and return-to-home system activated.
SORA defines 12 steps to perform a safety risk assessment (is not as much as it seems!) for your drone operation. As a previous step (step 0) an initial evaluation must be done. At this stage we need to verify if we are operating under a standard scenario[1], under the “open” category (SORA is just for “specific” category operations!), and if local authorities provided any restriction to operate in the pretended area or if they had determinated that the UAS is “harmless” for risks.
Once completed this first simple step, we will continue with our risk assessment doing the conOps[2] description (step 1). This is the input for our SORA assessment and involves the compilation of relevant information about the operation. Annex A[3] includes a detailed procedure for this compilation, so it shouldn’t suppose a hard work.

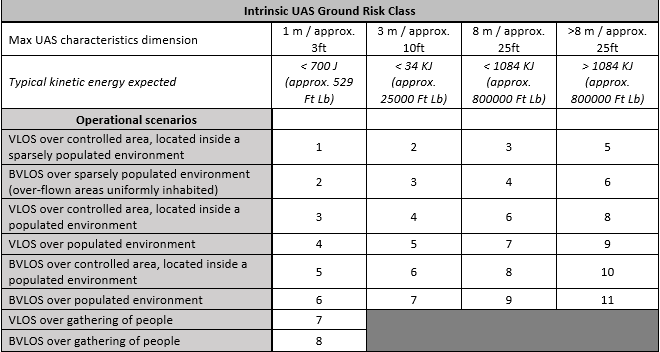
The next step is the determination of the initial UAS ground risk class – GRC (step 2), and is easier than it looks like. We just must consider the dimension of our drone, but each dimension choice is related with a range of typical kinetic energy. For us is more reliable to calculate previously this kinetic energy just looking inside to our student memories to recall the kinetic energy formula:
K.e = ; traducing to the drones’ market: k.e =
Replacing and solving for our example: K.e = = 25000 J = 25 KJ
Now we just have to choose 1 of the 8 operational scenarios proposed by SORA (the entire list is in page 24 of the SORA document). For our case, the most suitable option is: VLOS over controlled area, located inside a sparsely populated environment.
Finally, we must cross both values in the proposed table to find out our initial GRC:
[1] A list of standard scenarios will be developed as an independent document. In the middle, this option can be ignored.
[2] Concept of operations. Referred to the document that describes system characteristics from a user’s perspective.
[3] Annex A is included in the “SORA Package”, published by JARUS

![]()
[1] A list of standard scenarios will be developed as an independent document. In the middle, this option can be ignored.
[1] Concept of operations. Referred to the document that describes system characteristics from a user’s perspective.
[1] Annex A is included in the “SORA Package”, published by JARUS

- Alter Technology, first Notified Body in Europe accredited to certify drones - 9th February 2022
- Q&A – Declaration of Conformity and CE Marking - 4th November 2020
- NEW ISO STANDARD for Drones Released! - 29th January 2020
