Alter Technology is the coordinated procurement agency for the electronic components on-board the PLATO’s payload.
As a procurement agency, it is in charge of the engineering, testing and procurement of all the electronic components of the mission.

The PLAnetary Transits and Oscillations of stars (PLATO) is the 3rd mission of the middle class (M3) of the Cosmic Vision Program. PLATO aims to detect a large number of exoplanets around stars similar to the Sun to compare with our solar system. It will elaborate the first catalog of these planets reflecting sizes, mass and evolutionary stages. Furthermore this mission will have the largest multi-telescope ever taken to space.
The PLAnetary Transits and Oscillations of stars PLATO´s Background
The European Space Agency (ESA) gave the go-ahead for the further development of the PLAnetary Transits and Oscillations of stars (PLATO) space telescope by 20th June 2017.
 Launch of the telescope is scheduled for 2026 from the French Guiana.
Launch of the telescope is scheduled for 2026 from the French Guiana.
The primary goal of the mission is to look for Earth-like planets that show signs of having liquid water – what it is means, planets that have the potential to support life. The aim is to determine the radius, mass and age of exoplanets with unprecedented accuracy.
A consortium of several European research institutions will provide the payload – a scientific instrument comprised of 26 telescopes, the on-board computer, the data centre and the scientific data analysis.
PLATO will observe hundreds of thousands of stars for a minimum of two years, with 6.5 years in orbit and extensible for 8 yeras, and in doing so, will search for rocky planets orbiting Sun-like stars.
How is going to work PLATO?
 The PLATO mission will be the first of its kind to house multiple telescopes on one spacecraft. The instrument consists of 26 individual telescopes, two of which have a particularly fast response time and will be used for bright stars, colour requirements, and fine guidance and navigation.
The PLATO mission will be the first of its kind to house multiple telescopes on one spacecraft. The instrument consists of 26 individual telescopes, two of which have a particularly fast response time and will be used for bright stars, colour requirements, and fine guidance and navigation. 
Each telescope has an aperture of 12 centimetres and directs the incoming light onto its focal plane, which consists of four large-format CCD sensors.
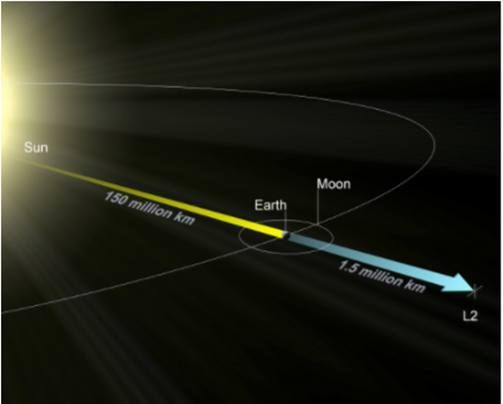
The spacecraft will be located at a Lagrange point; these are positions in space where the gravitational effects of two celestial bodies cancel each other out. These points are locations where a gravitational equilibrium exists, giving the impression that a spacecraft is ‘stationary’. The second Lagrange point of the Sun-Earth system (L2), some 1.5 million kilometres from Earth, is one
location that is of particular interest for space-based astronomy.
From the point of view of the telescope, the Sun is always positioned behind Earth, and Earth is always in the same direction. Looking towards the telescope from Earth, the same face of the spacecraft will always be observed, as is the case for the Moon, which reveals an almost unchanging portion of its surface to terrestrial observers.
Prior to PLATO there were other missions with focus on exoplanets such as – CHEOPS (CHaracterising ExOPlanet Satellite), the first small satellite mission to be undertaken by ESA, and the US mission TESS (Transiting Exoplanet Survey Satellite).
Payload
The PLATO Payload comprises the cameras including focal planes and related electronics as well as the onboard data processing system. The PLATO Payload (provided by the PLATO Mission Consortium) plus the optical bench on which the cameras are mounted (provided by ESA), constitute the PLATO Payload Module.
During most of the Definition phase, the payload configuration consisted of 28 or 32 normal and 2 fast cameras, which evolved to 24 normal and 2 fast cameras as a result of the Mission Adoption Review recommendations and final mission cost assessment.
Summary of the payload.
Camera Level
| wdt_ID | Characteristics | Value | Comments |
|---|---|---|---|
| 1 | Optics | Full refractive design with 6 lenses and 1 entrance window | Axisymmetric design |
| 2 | Optics spectral range | 500 – 1000 nm | |
| 3 | Pupil diameter | 120.0 mm | For one telescope |
| 4 | Camera focal plane layout | 4 CCDs in a square | |
| 5 | Normal camera detectors | Full frame CCDs 45104510 light sensitive, 18 μm square pixels | e2v CCD 270 |
| 6 | Fast camera detectors | Frame transfer CCDs 45102255 18 μm square pixels | e2v CCD 270 |
| 7 | Normal camera field of view | ~ 1037 deg² ~ circular, diameter 37.8 | For each telescope |
| 8 | Fast camera field of view | ~ 619 deg² | For each telescope. Only 50% of the focal plane light sensitive due to selection of frame transfer CCDs |
| 9 | Plate scale | 15.0 arcsec / px | For both normal and fast telescope |
| 10 | PSF surface | Always included within 9 px |
Payload Level
| wdt_ID | Characteristics | Value | Comments |
|---|---|---|---|
| 1 | Number of telescopes | 24 Normal + 2 Fast | |
| 2 | Payload field-of-view | Overlapping FoV of 2232 deg² | 24 cameras looking on 301 deg² 18 cameras looking on 247 deg² 12 cameras looking on 735 deg² 6 cameras looking on 949 deg² |
| 3 | Power needed by payload | ~ 820 W | |
| 4 | Mass of the payload | 533 kg | |
| 5 | Electronics | N-chain 1N-FEE / camera 1N-DPU / 2 cameras 2MEU with 12 NDPUs+PSU 1N-AEU/ 12 N-FEEs F-chain 1F-FEE / camera 2F-DPU / 2 cameras 1FEU with 2 x F-DPU/PSU 1F-AEU/ 2 fast cameras 2ICUs in cold redundancy | FEE and CCD activities are fully synchronised |
Image ESA
- Quantum Key Distribution - 7th November 2022
- Conducted Immunity - 20th May 2019
- Electrical transients Test - 2nd May 2019

